14. Synchronisatie¶
Dit hoofdstuk gaat over het synchroniseren van draadloze signalen in tijd en frequentie. Hiermee corrigeren we frequentieafwijkingen en stellen het moment van samplen af op symbool niveau. We zullen de klokhersteltechniek van Mueller en Muller, en de Costas Loop, gebruiken in Python.
Introductie¶
We hebben besproken hoe je digitale signalen draadloos kunt versturen met een digitaal modulatieschema zoals QPSK en de bandbreedte kunt beperken door het toepassen van vormgevende filters. We kunnen kanaalcodering toepassen bij slechte signaal-ruisverhoudingen. Het zal sowieso helpen om zoveel mogelijk te filteren voordat we het signaal verwerken. In dit hoofdstuk zullen we onderzoeken hoe synchronisatie wordt uitgevoerd aan de ontvangende kant. Synchronisatie is een reeks bewerkingen die plaatsvindt vóór demodulatie en kanaaldecodering. Hieronder zie je de totale zender-kanaal-ontvanger keten waarbij de blokken die we in dit hoofdstuk zullen behandelen, geel zijn gemaakt. (Dit diagram is niet allesomvattend - de meeste systemen bevatten ook egalisatie en multiplexing).

Draadloos kanaal simuleren¶
We zullen een realistischer kanaalmodel moeten gaan gebruiken voordat we het over synchronisatie gaan hebben. Zolang er geen willekeurige vertraging plaatsvindt is er namelijk geen synchronisatie nodig, of tenminste is het erg simpel om te synchroniseren (met de sampleklok). Je zou in dat geval alleen maar rekening hoeven houden met de vertraging die jouw filters introduceren. Naast een tijdsvertraging zullen we ook een frequentieafwijking simuleren; oscillators zijn immers niet perfect, er zal altijd een verschil zijn tussen de middenfrequentie van de zender en ontvanger.
We zullen eerst wat pythoncode gaan bekijken waarmee we een vertraging en frequentieafwijking kunnen simuleren. De code zal verder gaan waar het Pulse Shaping is geëindigd; alle code uit dit hoofdstuk kun je erachter toevoegen. Voor het gemak is de code hier ook te vinden:
pythoncode van het vorige hoofdstuk
import numpy as np
import matplotlib.pyplot as plt
from scipy import signal
import math
# symbolen genereren
num_symbols = 100
sps = 8
bits = np.random.randint(0, 2, num_symbols) # De te verzenden bits
pulse_train = np.array([])
for bit in bits:
pulse = np.zeros(sps)
pulse[0] = bit*2-1 # alleen eerste waarde gelijk aan bitwaarde
pulse_train = np.concatenate((pulse_train, pulse)) # de 8 samples toevoegen aan x
# het RC filter bouwen
num_taps = 101
beta = 0.35
Ts = sps # sample rate is 1 Hz, periodetijd is 1, *symbool*periodetijd is 8
t = np.arange(-51, 52) # neemt laatste nummer niet mee
h = np.sinc(t/Ts) * np.cos(np.pi*beta*t/Ts) / (1 - (2*beta*t/Ts)**2)
# signaal x filteren.
samples = np.convolve(pulse_train, h)
De code voor het weergeven van de figuren hebben we weggelaten, we gaan ervan uit dat je nu hebt geleerd hoe je dat moet doen. Om de figuren zoals in dit boek extra mooi te maken heb je veel extra code nodig, wat niet het leerdoel is.
Vertraging toevoegen¶
We zouden het signaal makkelijk kunnen vertragen door de samples te verschuiven, maar dit simuleert alleen een vertraging dat een veelvoud is van onze sampletijd. Realistisch gezien zal de vertraging nooit exact gelijk zijn aan de sampletijd. We kunnen een willekeurige vertraging geven met een speciaal filter dat alle frequenties doorlaat maar de samples wel vertraagt met een fractie van de sampletijd. Je kunt het zien als een alles-doorlaatfilter dat een faseverschuiving introduceert op alle frequenties. (Een tijdsvertraging en faseverschuiving zijn immers hetzelfde!) De pythoncode van dit filter staat hieronder:
# filter maken en toepassen
delay = 0.4 # fractie van de sampletijd
N = 21 # aantal coefficienten
n = np.arange(-N//2, N//2) # ...-3,-2,-1,0,1,2,3...
h = np.sinc(n - delay) # coefficienten berekenen
h *= np.hamming(N) # venster toepassen om beide kanten naar 0 te latten gaan
h /= np.sum(h) # normaliseren zodat de versterking 1 is en we het signaal niet dempen
samples = np.convolve(samples, h) # filter toepassen.
Zoals je ziet berekenen we de filtercoëfficiënten met behulp van de sinc() functie. Een sinc in het tijddomein is een rechthoek in het frequentiedomein en de rechthoek voor dit filter reikt over het hele frequentiebereik van ons signaal. Er is geen vervorming, alleen een vertraging. In dit voorbeeld is dat  . Hou in je achterhoofd dat elk filter een vertraging toevoegt gelijk aan het aantal coëfficiënten/2 -1 vanwege de convolutieoperatie.
. Hou in je achterhoofd dat elk filter een vertraging toevoegt gelijk aan het aantal coëfficiënten/2 -1 vanwege de convolutieoperatie.
De vertraging is te zien wanneer we de in en uitgang van het filter weergeven. Als je alleen een paar symbolen bekijkt is het goed zichtbaar.

Frequentieafwijking introduceren¶
Om het ontvangen signaal nog realistischer te maken kunnen we een frequentieafwijking toepassen. Stel we hebben een samplerate van 1 MHz gebruikt (dit is niet belangrijk maar maakt het vervolg wat makkelijker). Mochten we een frequentieverschuiving van 13 kHz (willekeurig gekozen) willen toepassen dan kan dat met deze code:
# freq afwijking
fs = 1e6 # samplerate van 1 MHz
fo = 13000 # offset 13 khz
Ts = 1/fs # sampletijd
t = np.arange(0, Ts*len(samples), Ts) # tijdvector
samples = samples * np.exp(1j*2*np.pi*fo*t) # verschuiving
Dit figuur laat het signaal voor en na de frequentieverschuiving zien.

Tot nu toe konden we alleen het reële I-deel weergeven omdat we BPSK gebruiken. Maar nu we een frequentieverschuiving hebben geïntroduceerd om een draadloos kanaal te simuleren verspreidt de energie zich over het I en Q deel. Dus vanaf nu moeten we beide delen weergeven. Voel je vrij een andere frequentieverschuiving te kiezen. Bij een verschuiving van 1 kHz zul je ook een sinusoïde kunnen herkennen in de omlijning van het signaal; het varieert dan langzaam genoeg om een paar symbolen te overspannen.
Als je de code bestudeert zul je zien dat de samplerate niet helemaal arbitrair is, het is afhankelijk van het ratio tussen fo en fs.
Voor nu kun je de code beschouwen als de simulatie van een draadloos kanaal. De code komt na de zender maar voor de ontvanger. De kant van de ontvanger gaan we verder bestuderen in dit hoofdstuk.
Tijdsynchronisatie¶
Wanneer een signaal draadloos wordt verzonden ervaart het een willekeurige faseverschuiving vanwege de reistijd. We kunnen niet zomaar op onze samplefrequentie beginnen te samplen want dan zitten we hoogstwaarschijnlijk naast het juiste samplemoment zoals aan het eind van Pulse Shaping is besproken. Bekijk eens de laatste drie figuren van dat hoofdstuk als je dit niet kunt volgen. Het doel is dus om de originele samplefrequentie en fase terug te vinden. Het wordt ook “clock-recovery” (herstellen van de klok) genoemd.
De meeste synchronisatietechnieken zijn gebaseerd op de phase locked loop (PLL); we zullen PLL’s hier niet bespreken maar het is goed om te weten en je kunt er zelf informatie over opzoeken als je geïnteresseerd bent. PLL’s zijn closed-loop systemen die feedback gebruiken om voortdurend wat bij te stellen; in dit geval een tijdsvertraging om op de pieken te kunnen samplen.
Je kunt de synchronisatie zien als een blok dat een stroom aan samples ontvangt en uitstuurt, net als een filter. Dit blok wordt ingesteld met informatie over ons signaal, met name het aantal samples per symbool (onze beste inschatting). Het blok werkt als een decimator, de samplefrequentie aan de uitgang is lager dan aan de ingang. We willen maar 1 sample per symbool hebben dus de factor is gelijk aan het aantal samples per symbool. Als we 1M symbolen per seconde zenden, en het signaal bij de ontvanger samplen met 16 MHz, dan krijgen we 16 samples per symbool. De ingangsfrequentie van het blok is dan 16 MHz maar de uitgang 1 MHz, gezien we maar 1 sample per symbool willen.
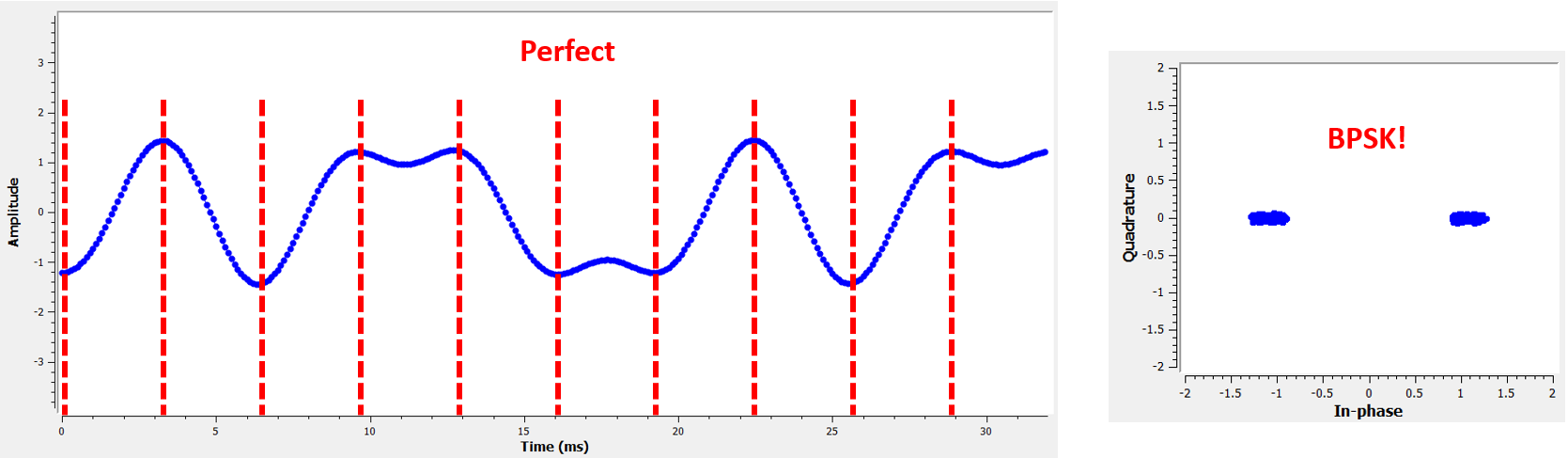
De meeste algoritmes leunen op het feit dat digitale symbolen stijgen en dalen en de overgang is het moment waarop we willen samplen. Anders verwoord, als we de absolute versie van ons signaal nemen dan willen we op de pieken samplen:
De meeste algoritmen zijn op een PLL gebaseerd en ze verschillen in de vergelijking die de afwijking in de tijd ( ) probeert te corrigeren. De waarde van
) probeert te corrigeren. De waarde van mu wordt in elke iteratie van de loop geüpdatet. Je kunt het bekijken als de waarde die vertelt hoeveel samples we het signaal moeten verschuiven om het “perfecte” samplemoment te vinden. Dus met een waarde van mu = 3.61 zouden we de ingang 3.61 samples moeten verschuiven om correct te kunnen samplen. Omdat we 8 samples per symbool hebben zou een mu>8 gewoon weer terugvouwen naar 0.
Het volgende stuk code implementeert het Mueller en Muller klokherstelalgoritme. Je kunt het testen zolang je de frequentieverschuiving 0 laat; dit corrigeert alleen een faseverschuiving:
mu = 0 # Eerste inschatting
out = np.zeros(len(samples) + 10, dtype=complex)
out_rail = np.zeros(len(samples) + 10, dtype=complex) # oude samples ook bewaren, we hebben de laatste 2 nodig
i_in = 0 # input samples index
i_out = 2 # output index (eerste twee zijn 0)
while i_out < len(samples) and i_in+16 < len(samples):
out[i_out] = samples[i_in + int(mu)] # probeer het "beste" sample.
out_rail[i_out] = int(np.real(out[i_out]) > 0) + 1j*int(np.imag(out[i_out]) > 0) #90,45,-45 of -90
x = (out_rail[i_out] - out_rail[i_out-2]) * np.conj(out[i_out-1])
y = (out[i_out] - out[i_out-2]) * np.conj(out_rail[i_out-1])
mm_val = np.real(y - x)
mu += sps + 0.3*mm_val
i_in += int(np.floor(mu)) # het is een index dus afronden
mu = mu - np.floor(mu) # getal achter de punt bepalen
i_out += 1 # index uitgang ophogen
out = out[2:i_out] # eerste 2 verwijderen, alles na i_out is niet gebruikt
samples = out # samples zijn de uitgang
Het blok wordt de “ontvangen” samples gevoerd en geeft aan de uitgang 1 sample per keer (i_out wordt telkens opgehoogd).
Het gebruikt niet alle ontvangen samples achter elkaar, maar slaat samples over in een poging sneller de juiste sample te vinden, op de piek van de puls.
Tijdens de herhaling probeert het langzaam met het symbool te synchroniseren door mu aan te passen.
Als de synchronisatie volledig is zou de uitgang alleen samples moeten bevatten die op de juiste momenten zijn genomen.
De snelheid waarmee de lus reageert wordt bepaald door de 0.3 constante; een hogere waarde reageert heftiger of sneller, maar kan het systeem instabiel maken.
De volgende grafiek toont een voorbeelduitvoer waarbij we zowel de fractionele tijdvertraging als de frequentieverschuiving uitgeschakeld hebben. We tonen alleen I omdat Q nu uit nullen bestaat vanwege het gebrek aan frequentieverschuiving. De drie figuren zijn boven elkaar gezet om te laten zien hoe de bits verticaal zijn uitgelijnd.
- Bovenste figuur
- De originele BPSK symbolen, dus 1’en en -1’en. Er zitten nullen tussen vanwege de 8 samples per symbool.
- Middelste figuur
- Na het vormgeven van de pulsen.
- Onderste figuur
- Na het uitvoeren van de tijdsynchronisatie blijft er 1 sample per symbool over. Deze samples worden direct in de demodulator gestopt wat voor BPSK een vergelijking met 0 betekent.

Als we naar de uitgang van het synchronisatieblok in het onderste figuur kijken, dan zien we dat het bijna 30 symbolen duurde voordat de juiste tijdvertraging was gevonden. Omdat een feedback-systeem altijd tijd nodig heeft om te reageren maken vele communicatieprotocolen gebruik van een “preamble” (Nederlands: reeks aan bits die het signaal voorgaan). Deze preamble bevat een synchronisatiesequentie: het verkondigt dat een nieuw pakketje is aangekomen, en geeft de ontvanger de tijd om te synchroniseren. Maar na ~30 symbolen werkt het perfect (in het figuur). Wat we overhouden zijn perfecte 1’en en -1’en die overeenkomen met de verzonden data. Natuurlijk helpt het dat dit voorbeeld geen ruis had. Voel je vrij het ruisniveau en de tijdsvertraging aan te passen om te kijken hoe de synchronisatie werkt. In geval van QPSK zouden we met complexe getallen werken, maar de aanpak blijft hetzelfde.
Tijdsynchronisatie met interpolatie¶
Meestal interpoleren synchronisatieblokken de ingangssamples door een bepaald nummer, bijv. 16, zodanig dat het signaal ook een fractie van de sampletijd verschoven kan worden. De willekeurige vertraging dat een draadloos kanaal introduceert, is hoogstwaarschijnlijk niet perfect gelijk aan een veelvoud van de sampletijd. Dit zal helemaal niet het geval zijn wanneer we 2 of 4 samples per symbool ontvangen. Door de samples te interpoleren geeft het ons de mogelijkheid om “tussen” de samples te samplen om de uiterste piek van het symbool te vinden. De uitgang zal nog steeds 1 sample per symbool bevatten, het is de ingang dat geïnterpoleerd wordt.
De pythoncode die we hierboven gebruikten voor de tijdsynchronisatie bevat geen interpolatie. Om de code uit te breiden kun je de fractionele tijdvertraging aanzetten dat we aan het begin van dit hoofdstuk hebben geïmplementeerd, dit geeft een realistischer beeld. Laat de frequentieverschuiving uit staan. Wanneer je de simulatie opnieuw uitvoert zul je zien dat er nooit volledig gesynchroniseerd wordt met het signaal. Dit komt omdat we niet interpoleren en het dus niet mogelijk is om tussen de samples in te samplen. Laten we interpolatie toevoegen.
De snelste en makkelijkste manier om met Python een signaal te interpoleren is door gebruik te maken van scipy’s signal.resample of signal.resample_poly. Beide functies bereiken hetzelfde, maar werken iets anders. We zullen de tweede functie toepassen omdat deze wat sneller is. We gaan een interpolatiefactor van 16 gebruiken, dus we voegen 15 extra samples tussen elke sample toe. Dit kunnen we in 1 regel code doen en moet voor de tijdsynchronisatie worden toegevoegd. Het synchronisatie-algoritme moet ook iets aangepast worden. We kunnen het verschil bekijken:
samples_interpolated = signal.resample_poly(samples, 16, 1)
# Plot the old vs new
plt.figure('before interp')
plt.plot(samples,'.-')
plt.figure('after interp')
plt.plot(samples_interpolated,'.-')
plt.show()
Als we het heel erg vergroten dan zien we dat het hetzelfde signaal is, maar met 16x zoveel punten:

Hopelijk is de reden achter het interpoleren duidelijk aan het worden. De extra samples staan ons toe om ook een fractie van de sampletijd te kunnen zien. Na het interpoleren van de samples zullen we ook twee regels van het synchronisatieblok moeten aanpassen. De eerste twee regels van de while loop worden dan:
while i_out < len(samples) and i_in*16+16 < len(samples):
out[i_out] = samples[i_in*16 + int(mu*16)] # probeer het "beste" sample.
We hebben een aantal dingen aangepast. Als eerste kunnen we i_in niet meer gebruiken als de sampleindex. We hebben nu 16 keer zoveel samples dus we moeten de index met 16 vermenigvuldigen. De loop past mu aan. Dit stelt de vertraging voor dat we nodig hebben om correct te samplen.
Eerder kon we niet een fractie van de sampletijd wachten, maar nu wel, in stappen van een 16e van de sampletijd.
We vermenigvuldigen \mu dus met 16 om uit te vogelen met hoeveel samples we ons geïnterpoleerde signaal moeten vertragen.
Als deze paragraaf niet duidelijk is, probeer dan de initiële code met het commentaar nogmaals door te lezen.
Het is niet heel belangrijk dat je het algoritme snapt, maar wel de limitatie ervan.
Voel je vrij om met eigen interpolatiefactoren te spelen. Je kunt ook proberen om de frequentieverschuiving nu toe te passen, of ruis toe te voegen, om te zien hoe het synchronisatiealgoritme dit aanpakt (hint: misschien moet je die 0.3 factor ook aanpassen).
Als we een frequentieverschuiving toepassen van 1 kHz dan zie je de volgende situatie. Omdat we een frequentieverschuiving hebben toegevoegd, door het vermenigvuldigen met een complex exponent, zullen we beide I en Q moeten weergeven:

Het is nu iets lastiger te zien maar de tijdsynchronisatie werkt nog steeds prima. Er is nu een sinusoïde zichtbaar omdat we een frequentieverschuiving hebben geïntroduceerd. In het volgende deel leren we hier mee om te gaan.
Het IQ-diagram (constellatie-diagram) van voor en na de synchronisatie is hieronder te zien. Mocht je het zijn vergeten; je kunt een IQ-diagram maken d.m.v. een “scatter plot”: plt.plot(np.real(samples), np.imag(samples), '.'). In de animatie hebben we bewust de eerste en laatste 30 symbolen niet meegenomen omdat het algoritme toen nog niet klaar was met synchroniseren. De symbolen die overblijven zijn allemaal rond de eenheidscirkel verdeeld vanwege de frequentieverschuiving.

We kunnen nog meer leren wanneer we de constellatie over de tijd uitzetten. Aan het begin zijn de symbolen eventjes niet 0 of op de eenheidscirkel. Dat is de tijd die het synchronisatiealgoritme nodig heeft om de juiste tijdsvertraging te vinden. Het gebeurt in een korte tijd dus kijk goed! Het ronddraaien komt door de frequentieverschuiving. Frequentie is een constante verandering in de fase, dus een frequentieverschuiving resulteert in het ronddraaien van het BPSK-diagram, wat leid tot een cirkel in het statische diagram van hierboven.
Hopelijk heb je dankzij de animatie een beter beeld van wat er echt gebeurt, en een gevoel voor hoe het werkt. In de praktijk werkt de while loop alleen op een beperkt aantal samples (bijv. 1000) en zul je het herhaaldelijk moeten aanroepen. Tussen de aanroepen in moet je de waarde van mu en de laatste paar waarden van out en out_rail onthouden.
Nu gaan we ons druk maken over frequentiesynchronisatie, opgedeeld in grove en fijne synchronisatie. Meestal doen we eerst de grove en daarna de fijne.
Grove Frequentiesynchronisatie¶
Ook al stellen we de zender en ontvanger op dezelfde frequentie in, er zal door imperfecte hardware (de oscillator) of het Dopplereffect (beweging) altijd een klein frequentieverschil ontstaan. Het frequentieverschil zal minimaal zijn vergeleken met de draaggolf, maar zelfs een klein verschil kan een digitaal signaal verpesten. De oscillator binnen de Pluto heeft bijvoorbeeld een nauwkeurigheid van 25 PPM. Dus als je op 2.4 GHz afstelt, dan zou dat er maximaal +/- 60 kHz naast kunnen zitten. De samples die we van de SDR krijgen zitten in de basisband, we zien dan het frequentieverschil ook in de basisband. Een BPSK-signaal met een klein verschil in draaggolf ziet er ongeveer als het onderstaande figuur uit, wat duidelijk niet zo handig is voor de demodulatie. We zullen dus elke frequentieverschuiving moeten verwijderen voordat we demoduleren.

Frequentiesynchronisatie wordt meestal opgedeeld in de grove en fijne sync, waar de grove synchronisatie grote verschillen, van een kHz of meer, kan corrigeren, en de fijne sync corrigeert het overgebleven verschil. Grove correctie gebeurt voor tijdsynchronisatie en fijne correctie erna.
Wiskundig gezien, als een basisband signaal  een frequentie(draaggolf)verschuiving ervaart van
een frequentie(draaggolf)verschuiving ervaart van  Hz, dan is het ontvangen signaal
Hz, dan is het ontvangen signaal  uit te drukken als:
uit te drukken als:

Waar  de ruis is.
de ruis is.
De eerste truc voor grove inschatting van de frequentieafwijking, is om het kwadraat van ons signaal te nemen. Wanneer we de afwijking weten, dan kunnen we het ongedaan maken. Om het simpel te houden negeren voorlopig de ruis:

Wat zou er gebeuren wanneer we het kwadraat nemen van een QPSK-signaal? Kwadrateren van complexe getallen geeft een interessant resultaat, met name wanneer we de constellatiediagrammen van BPSK en QPSK bekijken. De volgende animatie laat zien wat er gebeurt wanneer we QPSK tweemaal kwadrateren. Er is bewust voor QPSK gekozen zodat je ziet dat eenmaal kwadrateren een BPSK-signaal geeft. Als je het nog een keer kwadrateert zie je een cluster. (Dank aan Ventrella voor deze gave app http://ventrella.com/ComplexSquaring/ .)
En nog een keer met een kleine fasedraaiing en amplitudeaanpassing om het realistischer te maken:
Het resultaat blijft een cluster, maar nu met een fasedraaiing. De clou is, dat wanneer je QPSK tweemaal kwadrateert (en BPSK eenmaal), het alle vier de clusters samenvoegt tot een cluster. Waarom is dit handig? Door het samenvoegen verwijderen we de modulatie. Nu alle punten in een cluster vallen houden we effectief een rij van constanten over voor . Het enige wat dan overblijft is de sinusoïde die wordt veroorzaakt door het frequentieverschil (en nog ruis maar dat negeren we voor nu). Het blijkt dat je een signaal N maal moet kwadrateren, waarbij N de orde van het modulatieschema is. Deze truc werkt dan alleen wanneer je van ten voren het modulatieschema kent. De algemene vergelijking wordt dan:

In het geval van BPSK hebben we een 2e orde modulatieschema, dus dan zou de vergelijking dit worden:
We weten nu wat er met het deel van de vergelijking gebeurt, maar hoe zit het met het sinusoïde deel (het complexe exponent)?
Zoals is te zien voegt het  toe aan de vergelijking, dus in plaats van de originele frequentieverschuiving is het nu N keer zo veel:
toe aan de vergelijking, dus in plaats van de originele frequentieverschuiving is het nu N keer zo veel:  . De makkelijkste manier om met Python de waarde van te vinden is door middel van een FFT. Laten we dat doen. We nemen weer ons BPSK signaal, maar in plaats van een fractionele vertraging gaan we nu een frequentieverschuiving toevoegen door het signaal te vermenigvuldigen met
. De makkelijkste manier om met Python de waarde van te vinden is door middel van een FFT. Laten we dat doen. We nemen weer ons BPSK signaal, maar in plaats van een fractionele vertraging gaan we nu een frequentieverschuiving toevoegen door het signaal te vermenigvuldigen met  zoals we in het Filters hoofdstuk hadden gedaan.
zoals we in het Filters hoofdstuk hadden gedaan.
Met behulp van de code uit het begin van dit hoofdstuk kun je een afwijking van 13 kHz aan ons signaal toevoegen. De afwijking wordt geïntroduceerd door het kanaal. Je kunt het dus tussen de twee RRC-filters, of na het enkele RC-filter toevoegen.
Laten we de FFT weergeven en kijken wat voor resultaat het kwadrateren geeft in het frequentiedomein. Je zou nu moeten weten hoe je een FFT uitvoert, inclusief de abs() en fftshift() functies. Het maakt in dit geval niet uit of je de log neemt, we zijn alleen geïnteresseerd in waar de frequentiepiek zit. Niet hoe hoog het is.
Eerst bekijken we het signaal zonder te kwadrateren, met een normale FFT:
psd = np.fft.fftshift(np.abs(np.fft.fft(samples)))
f = np.linspace(-fs/2.0, fs/2.0, len(psd))
plt.plot(f, psd)
plt.show()

Er is helemaal geen draaggolf te herkennen, het wordt verborgen door ons signaal.
Nogmaals na het kwadrateren:
# Voeg dit toe voor de FFT regel
samples = samples**2
Door het figuur te vergroten kunnen we bepalen waar de piek zit:

Je zou het aantal symbolen kunnen vergroten (bijv. 1000 symbolen) zodat we genoeg samples hebben voor de FFT. Hoe meer samples de FFT gebruikt, hoe nauwkeuriger we de frequentieafwijking kunnen inschatten. Ter herinnering, de bovenstaande code moet voor de tijdsynchronisatie plaatsvinden. Deze kan immers niet goed omgaan met een grote frequentieafwijking.
De frequentiepiek verschijnt bij . We moeten de bin (26.6 kHz) dus door 2 delen om te vinden. 13.3 kHz is bijzonder dicht bij de frequentieverschuiving die we hebben toegepast aan het begin van dit hoofdstuk. Als je een andere frequentie had gekozen is dat ook geen probleem, zolang je maar bewust bent wat het zou moeten zijn.
De maximale frequenties die we kunnen zien met een samplerate van 1 MHz zijn -500 kHz tot 500 kHz. Wanneer we ons signaal tot de macht N verheffen, dan kunnen we alleen nog de frequentieverschuivingen tot  “zien”, dus in het geval van BPSK +- 250 kHz. Voor QPSK slechts 125 kHz; zou de afwijking van de draaggolf groter zijn dan dit, dan kunnen we het niet meer vinden met deze techniek. Om je een gevoel te geven voor het Doppler-effect, als we op 2.4 GHz zouden zenden, en de zender of ontvanger gingen zo’n 100 km/u (het gaat om het relatieve verschil), dan levert dat een verschuiving op van ongeveer 215 Hz. De afwijking dat een goedkope oscillator introduceert is hoogstwaarschijnlijk de grootste bron van afwijking.
“zien”, dus in het geval van BPSK +- 250 kHz. Voor QPSK slechts 125 kHz; zou de afwijking van de draaggolf groter zijn dan dit, dan kunnen we het niet meer vinden met deze techniek. Om je een gevoel te geven voor het Doppler-effect, als we op 2.4 GHz zouden zenden, en de zender of ontvanger gingen zo’n 100 km/u (het gaat om het relatieve verschil), dan levert dat een verschuiving op van ongeveer 215 Hz. De afwijking dat een goedkope oscillator introduceert is hoogstwaarschijnlijk de grootste bron van afwijking.
De afwijking ook echt corrigeren gebeurt op dezelfde manier als waarop we het hebben toegevoegd: vermenigvuldigen met een complex (negatieve) exponent.
max_freq = f[np.argmax(psd)]
Ts = 1/fs # sampletijd
t = np.arange(0, Ts*len(samples), Ts) # tijdvector
samples = samples * np.exp(-1j*2*np.pi*max_freq*t/2.0)
Het is aan jou of je de afwijking wilt corrigeren, of gewoon verlagen tot zo’n 500 Hz om te kijken hoe fijne synchronisatie daarmee omgaat. Daar gaan we nu naar kijken.
Fijne Frequentiesynchronisatie¶
We zullen nu naar fijne frequentiecorrectie overschakelen. De vorige truc was open-lus en is alleen geschikt om een grove correctie uit te voeren. Voor de fijne correctie willen we terugkoppeling gaan toepassen in de vorm van een PLL. Het doel is om het frequentieverschil tot nul te brengen en te houden, zelfs wanneer het frequentieverschil over de tijd varieert. We zullen continu het verschil moeten bijhouden. Fijne synchronisatietechnieken werken het beste op symboolniveau zonder een tijdafwijking. De code die we hier behandelen komt dus na de tijdsynchronisatie.
We zullen de Costas-loop gaan toepassen. Dit is een soort PLL dat speciaal is ontwikkeld om een draaggolfafwijking te corrigeren bij digitale signalen zoals BPSK en QPSK. Het is uitgevonden door John P. Costas bij General Electric in de jaren 50 en heeft een enorme impact gehad op moderne digitale communicatie. De Costas-loop zal niet alleen de frequentieafwijking corrigeren, maar ook elke faseverschuiving. Frequentie is gewoon een faseverandering dus ze kunnen beiden gevolgd worden. De Costas-loop kan worden samengevat met het volgende figuur (let op dat de halveringsfactor is weggelaten uit de vergelijkingen omdat dit geen invloed heeft).

De spanningsgestuurde oscillator (VCO) is gewoon een sin/cos signaalgenerator dat een, op de ingang gebaseerde, frequentie gebruikt. In ons geval, omdat we een draadloos kanaal simuleren, is het geen spanning maar een niveau aangegeven door een variabele. Het bepaalt de frequentie en fase van de gegenereerde sinus en cosinus golven. Het vermenigvuldigt het ontvangen signaal met een zelf gegenereerde sinusoïde in een poging de frequentie- en faseafwijking ongedaan te maken. Dit gedrag is vergelijkbaar met hoe een SDR een signaal naar de basisband verschuift en de I- en Q-takken maakt.
Hieronder is de code te vinden van de Costas-Loop:
N = len(samples)
fase = 0
freq = 0
# Deze volgende twee parameters bepalen of de feedback loop sneller of langzamer reageert (wat de stabiliteit beinvloed)
alpha = 0.132
beta = 0.00932
uit = np.zeros(N, dtype=complex)
freq_log = []
for i in range(N):
uit[i] = samples[i] * np.exp(-1j*fase) # pas de ingang aan met de inverse van de geschatte faseafwijking
fout = np.real(uit[i]) * np.imag(uit[i]) # De is de foutvergelijking voor de 2e orde Costas-loop (dus voor BPSK)
# Update de fase en frequentie
freq += (beta * fout)
freq_log.append(freq * fs / (2*np.pi)) # zet hoekfrequentie om naar Hz voor het loggen
fase += freq + (alpha * fout)
# Optioneel: zorg dat de fase tussen 0 en 2pi blijft
while fase >= 2*np.pi:
fase -= 2*np.pi
while fase < 0:
fase += 2*np.pi
# druk frequentie over de tijd af om de voortgang te kunnen zien
plt.plot(freq_log,'.-')
plt.show()
#als je verder wilt gaan met samples...
#samples=uit
Er gebeurt een hoop dus laten we erdoorheen lopen. Sommige regels zijn eenvoudig en andere super ingewikkeld.
samples is onze ingang, uit onze uitgang.
fase en freq werken zoals de mu bij het tijdsynchronisatievoorbeeld.
Ze bevatten de huidig geschatte afwijking en elke iteratie worden de samples van de ingang vermenigvuldigd met np.exp(-1j*phase).
De fout variabele kwantificeert de fout in de correctie, en voor een 2e orde Costas-loop is dit een simpele vergelijking.
We vermenigvuldigen het reële deel van de sample (I) met het imaginaire deel (Q). Omdat het Q-deel 0 zou moeten zijn voor BPSK wordt de foutvergelijking geminimaliseerd wanneer er geen fase- of frequentieafwijking is.
De 4e orde vergelijking (QPSK) is nog steeds relatief simpel, maar niet meer een enkele regel, gezien beide I en Q energie zullen bevatten, zelfs wanneer het signaal geen afwijking heeft.
We gaan het nu niet toepassen, maar mocht je benieuwd zijn naar hoe de QPSK-versie in code eruitziet dan kun je hieronder klikken.
4e orde Costas-Loop foutvergelijking (voor de geïnteresseerden)
# For QPSK
def phase_detector_4(sample):
if sample.real > 0:
a = 1.0
else:
a = -1.0
if sample.imag > 0:
b = 1.0
else:
b = -1.0
return a * sample.imag - b * sample.real
De alpha en beta variabelen bepalen hoe snel de fase en frequentie worden geüpdatet. Er is een reden waarom ik die twee waarden heb gekozen, maar dat gaan we niet behandelen. Als je nieuwsgierig bent kun je alpha en/of beta variëren om te kijken wat er gebeurt.
Iedere iteratie loggen we freq naar het scherm zodat we de responsie van het regelalgoritme zien bij het corrigeren van de frequentieafwijking. Om de frequentie in Hz te laten zien moeten we freq vermenigvuldigen met de samplerate en door  delen.
Mocht je eerst de tijdsynchronisatie hebben uitgevoerd, dan zul je
delen.
Mocht je eerst de tijdsynchronisatie hebben uitgevoerd, dan zul je freq ook nog door sps moeten delen omdat de originele samplerate sps keer zo klein is.
Als laatste moet de berekende fase gecorrigeerd worden om het tussen 0 en  te houden.
te houden.
Het signaal voor en na onze Costas-Loop ziet er dan zo uit:

De frequentie-inschatting uitgezet over de tijd (een -300 Hz offset werd voor dit voorbeeld gebruikt):
Het duurt bijna 70 samples voordat het algoritme de afwijking heeft gevonden. Je kunt zien dat de grove frequentiesynchronisatie nog steeds 300 Hz ernaast zat. De jouwe kan een andere waarde hebben. Zoals ik al eerder zei, kun je de grove frequentiesynchronisatie uitschakelen en de initiële frequentieafwijking instellen op elke gewenste waarde en kijken of de Costas-Loop het kan corrigeren.
De Costas-loop heeft niet alleen de frequentieafwijking gecorrigeerd, maar ook ons BPSK-signaal uitgelijnd met het I deel waardoor Q weer nul is geworden. Dit is een bijkomend voordeel van de Costas-loop, en maakt het in essentie ook onze demodulator. We hoeven alleen nog maar te kijken of het reële I-deel boven of onder de 0 is. Helaas weten we nog niet of de negatieve of positieve waarde correspondeert met 0 of 1 want er kan een inversie plaats hebben gevonden; de Costas-loop kan dat in geen mogelijkheid weten. Hier komt differentiële codering om de hoek kijken. Dit verwijdert de twijfel omdat 1’en en 0’en nu worden gebaseerd op het feit dat er een verandering heeft plaatsgevonden, niet of het een -1 of +1 was. Wanneer de differentiële codering toepassen dan gebruiken we nog steeds BPSK. We zouden dit coderingsblok net voor de modulatie op de tx kant, en net na demodulatie op de rx kant, stoppen.
Hieronder zie je een animatie van de tijdsynchronisatie en frequentiecorrectie algoritmen, de tijdsynchronisatie gebeurt bijna meteen, maar de frequentiecorrectie heeft bijna de hele animatie nodig om de juist instelling te vinden. Dit komt omdat we een te lage waarde hadden gekozen voor alpha en beta (0.005 en 0.001). De code van deze animatie is hier te vinden.
Frame-synchronisatie¶
We hebben behandeld hoe je een tijd-, frequentie- of faseafwijking in een ontvangen signaal kunt corrigeren. De meeste communicatieprotocollen sturen echter niet alleen data, maar maken gebruik van pakketten/frames. De ontvanger moet namelijk kunnen zien waar een frame start. Gewoonlijk is er een frame header (op de MAC laag) dat vertelt hoeveel bits in het frame zitten. We kunnen die informatie gebruiken om te weten hoe lang het hele frame is in samples of symbolen. Toch is de start van een frame vind een hele taak op zich. Hieronder zie je de structuur van een wifi-frame. Het valt op dat het eerste ding wat verstuurd wordt een PHY-laag header is, en de eerste helft van die header is een “preamble” (aankondiging).Deze preamble bevat een rij van bits die de ontvanger kan gebruiken om de start van een frame te herkennen. De preamble is van tevoren bekend bij de ontvanger.

Een veel gebruikte en logische methode om deze rij van bits de detecteren is door de ontvangen data te (kruis)correleren met de bekende preamble. Wanneer de juiste rij bits binnen komt dan lijkt de correlatie op de eigencorrelatie (maar met ruis). Om deze reden worden de preambles zo gekozen dat de eigencorrelatie mooie eigenschappen heeft. De autocorrelatie moet bijvoorbeeld alleen op plek 0 een piek geven, en niet op andere plekken. Een voorbeeld is een Barker code. In 802.11/wifi wordt een Barker code van lengte 11 toegepast voor de 1 en 2 Mbit/sec snelheden:
+1 +1 +1 −1 −1 −1 +1 −1 −1 +1 −1
In feite zouden dit 11 BPSK symbolen kunnen zijn. We kunnen de eigencorrelatie van deze rij gemakkelijk met Python vinden:
import numpy as np
import matplotlib.pyplot as plt
x = [1,1,1,-1,-1,-1,1,-1,-1,1,-1]
plt.plot(np.correlate(x,x,'same'),'.-')
plt.grid()
plt.show()

De piek is in het midden, en 11 hoog (de lengte van de rij). Op alle andere vertragingen levert het -1 of 0 op. Dit werkt goed om de start van een frame te vinden, omdat de kruiscorrelatie in feite de energie van 11 symbolen integreert tot een piek van een enkele bit. Het moeilijkste aan het detecteren van de start is om de juiste threshold te kiezen. Je wilt niet dat data dat geen onderdeel van het protocol is, toch een start aangeeft. Dus na de kruiscorrelatie zul je ook het vermogen moeten normaliseren, wat buiten de scope valt van dit boek. In het bepalen van de juiste threshold zul je een afweging moeten maken tussen de kans op detectie en de kans op een vals alarm. De frame-header bevat immers zelf ook informatie, dus bepaalde valse alarmen zijn niet erg; zodra je de header decodeert en de CRC faalt, dan weet je dat het geen frame was. Het zou erger zijn als je een frame helemaal mist.
Een andere sequentie van bits met hele goede eigencorrelatie-eigenschappen is de Zadoff-Chu reeks. Dit wordt in LTE toegepast. Zij hebben het voordeel dat ze in sets komen; er zijn meerdere verschillende sequenties die goede eigenschappen hebben, maar elkaar niet zullen triggeren (dus ook goede kruiscorrelatie eigenschappen ten opzichte van elkaar). Dankzij die feature kunnen verschillende telefoonmasten verschillende sequenties gebruiken zodat een telefoon niet alleen de start van een frame van detecteren, maar ook van welke mast het signaal komt.